Controlar ESP8266 desde Telegram
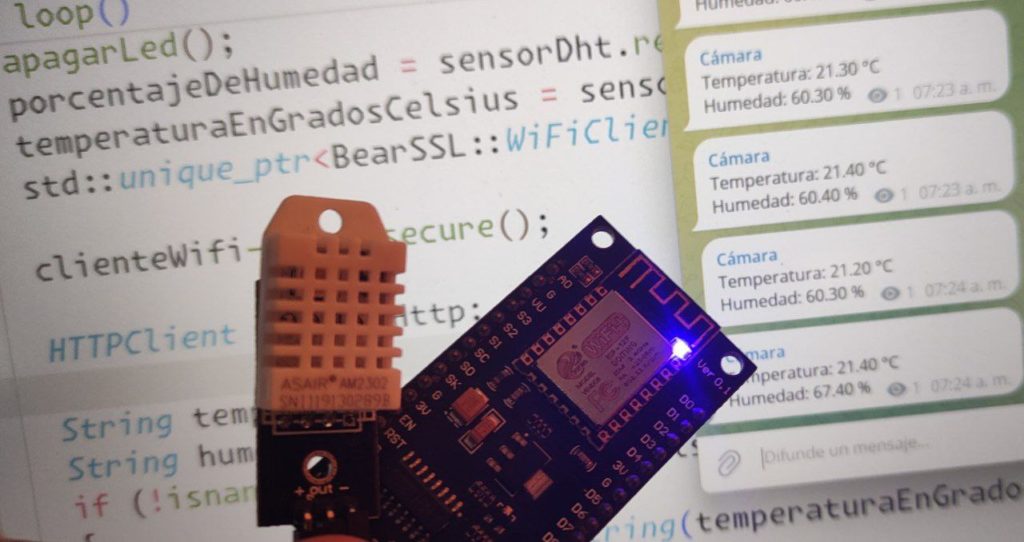
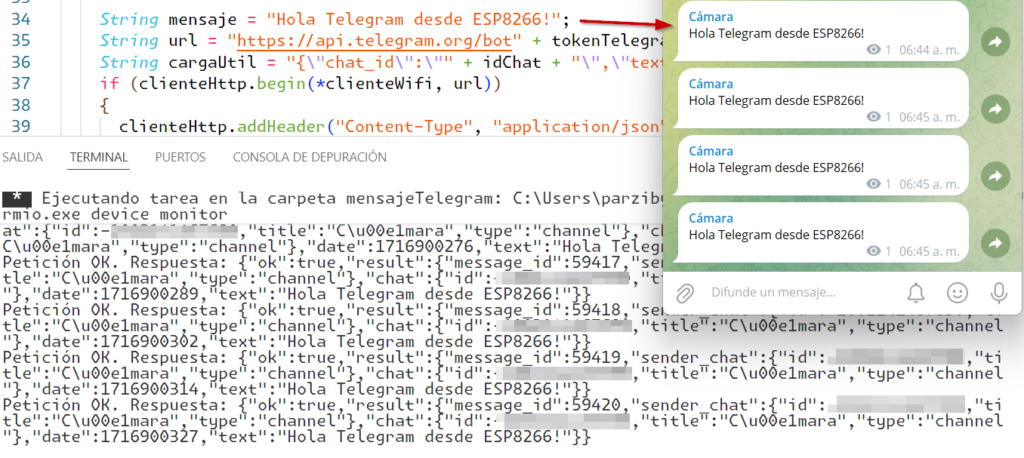
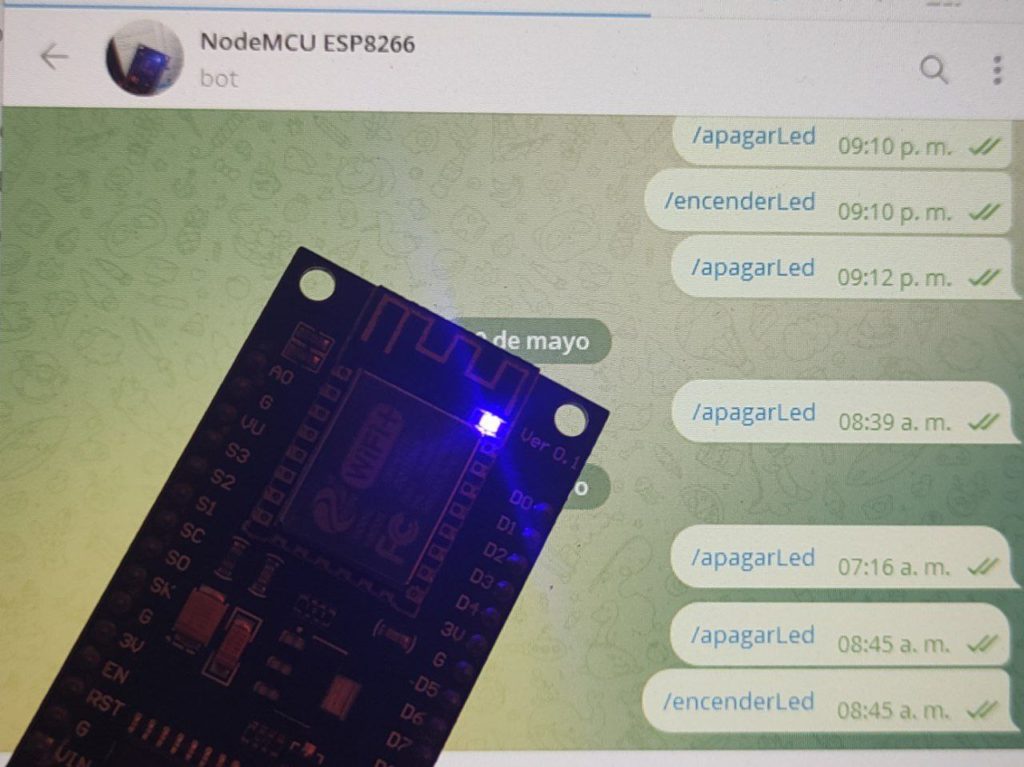
Ya te enseñé cómo enviar un mensaje simple desde la NodeMCU ESP8266 a Telegram y cómo enviar las mediciones de temperatura y humedad usando un Bot de Telegram. En este post vamos a ver cómo controlar una ESP8266 desde Telegram, encendiendo y apagando un LED con los comandos enviados. De este modo vas a poder […]
Controlar ESP8266 desde Telegram Leer más »